-
 Hacettepe Teknokent, 4.Arge Binası
Hacettepe Teknokent, 4.Arge Binası
B-Blok No:9, Çankaya Ankara Türkiye -
 +90 312 227 02 64
+90 312 227 02 64
-
 info@hoytek.com.tr
info@hoytek.com.tr
-
Hacettepe Teknokent, 4.Arge Binası
B-Blok No:9, Çankaya Ankara Türkiye -
+90 312 227 02 64
-
info@hoytek.com.tr

Gelişen endüstrileşmenin hızla ilerlemesi ile enerji ihtiyacı da artarak devam etmektedir. Bu ihtiyacı karşılayabilmek için yeni fosil yakıt kaynaklarının araştırmaları da hızla artmaktadır. Günümüzde yeni enerji kaynaklarının (güneş enerjisi, rüzgâr enerjisi vb.) gereken ihtiyaçları karşılamak için yetersiz kalması veya etkin olmaması nedeni ile fosil yakıtlar hala ihtiyacı karşılamakta en büyük kaynak olarak kullanılmaktadırlar. Enerji ihtiyacımızın %80’i hala fosil yakıtlar ile karşılanmaktadır; bu ihtiyacın da %50-%60 kadarını petrol ve gaz olarak karşılamaktayız.
1940 yılında günlük 1 Milyon varil olan petrol üretimi, 2009 yılında günlük 24 Milyon varile çıkmıştır. 2009 yılından sonra giderek artan ihtiyaçlar ve gelişen teknikler ile petrol üretimi 2015 yılında günlük 80 Milyon varil seviyesine ulaşmıştır. Bu üretimin üçte biri denizlerden çıkarılan petrol ile yapılmaktadır ve off-shore (denizlerden çıkarılan) petrolün yüzdesi, karadaki petrol rezervlerinin gün be gün azalması ve denizaltındaki kaynakların keşfinin kolaylaşması ile, her geçen gün artmaktadır.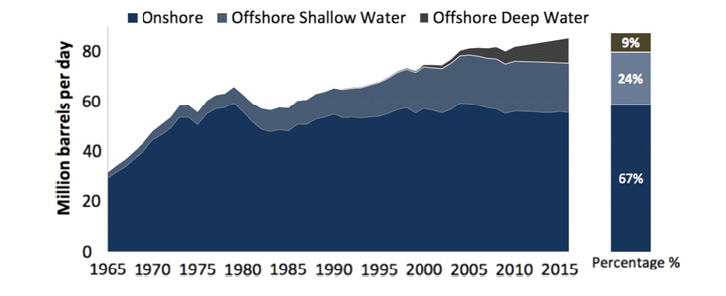
Denizaltındaki kaynaklardan fosil yakıtların çıkarılmaya başlaması ile ihtiyaçlar daha belirgin hale gelmiş, bu ihtiyaçlar ile sorunlar da daha rahat gözlemlenebilir olmuştur. Sorunların en başında, 20 Nisan 2010 yılında Meksika Körfezi’nde yaşanan Deepwater Horizon felaketinde ortaya çıkan gerçeklerdir. BP firmasının 2001 yılından 2013 yılına kadar kiraladığı petrol platformunda yaşanan patlama sonucunda, platformda çalışan 11 kişi ölmüş, 17 kişi ise ağır yaralanmıştır. Patlama sonrası 757 milyon litre petrol denize saçılmış, başta deniz altındaki yaşam olmak üzere yöre balıkçıları, devlet kaynakları ve BP büyük zarara uğramıştır. Temizlenmesi on yıllar alacak olan felaketin, BP şirketi tarafından açıklanan kaynak ve maliyeti “ 2010 yılında başlanan temizlik operasyonu için 48000 insan, 6500 araç ile 4000 kilometrelik bir alanda çalışma yapılmış. 2014 Nisan ayında US Coast Guard (Amerika Birleşik Devletleri Sahil Güvenlik) yardım çalışmalarını sonlandırmış; 2014 Aralık ayı itibari ile 14 Milyar Amerikan Doları ve 70 Milyon adam/saat harcanmıştır.” şeklinde belirtilmiştir.
Yaşanan felaketin nedeninin zamanında yapılmayan boru hattı ve kuyu denetlemeleri olduğu ortaya çıkmış, Avrupa Komisyonu tarafından bu olay sonrasında yeni regülasyonlar getirilmiş ve denizde petrol arama operasyonlarının daha güvenli hale getirilmesi için çalışmalar başlatılmıştır. Olay sonrasında BP şirketi hakkında bir çok dava açılmış ve şirket temizlik bitene kadar çalışmalara devam etmek ile yükümlü tutulmuştur.
Deepwater Horizon sonrası insan hayatı ve deniz yaşamının daha fazla zarar görmemesi, çalışmaların daha kontrollü ve efektif yapılabilmesi için yeni regülasyonlar ve teknikler uygulanmaya başlanmıştır. Bu tekniklerin başında ROV (Uzaktan Kumandalı İnsansız Denizaltı) ve AUV (Otonom Su Altı Aracı) kullanımı gelmektedir.
Off-shore fosil yakıt uygulamalarında robotların kullanımı çalışmaları daha güvenli, daha ucuz ve daha efektif hale getirmiştir. Sektörde kullanılan dalgıçların günlük maliyetinin üçte biri ile 24 saat ve 7 gün çalışabilen ROV’lar ve araştırma görevleri için kullanılan AUV’ler efektif üretimi de arttırmıştır. Denizde petrol çıkarırken uygulanan 3 aşama vardır:
Keşif ve Ham Petrol Çıkarma (Upstream): Bu aşamada deniz tabanı ROV ve AUV’ler ile taranarak gerekli bilgiler toplanır ve önce Jeologlar sonrasında da Jeokimyacılar ve Jeofizikçilerin alınan verilere başvurularak petrol/gaz kaynaklarının yeri belirlenir, daha sonra belirlenen lokasyonda sondaj işlemi yapılarak kuyu ağızı açılır. Açılan kuyu ağızına deniz derinliği ve rezerv büyüklüğü göz önüne alınarak uygun petrol platformu yerleştirilir. Petrol platformları kuyunun bulunduğu derinlik, rezervin büyüklüğü, operasyon süresi ve maliyeti göz önüne alınarak, sabit veya hareketli olarak seçilir. Sabit platformların kurulumu ve bakım/denetlemesinde ROV’ler aktif olarak kullanılmaktadır. Hareketli platformlarda ise hem ROV hem de AUV’ler bakım/onarım ve çevre şartlarının gözleminde sürekli kullanılmaktadır.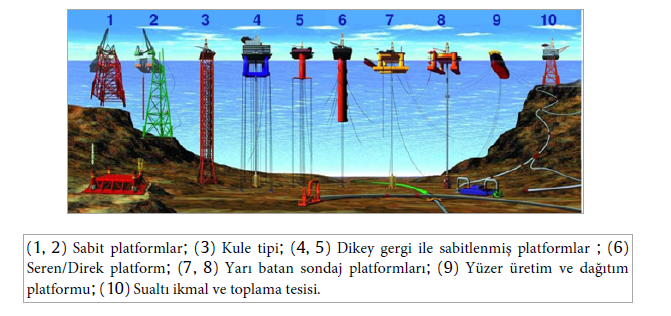
Platform’un kurulma aşaması öncesinde zemin etüdü ve çevre şartları çalışmaları AUV’ler ile yapılmaktadır. Daha sonra platform ayaklarının veya gergi sabitleme noktalarının belirlenmesi ve bu çalışmalarda gözlem yapması için ROV’lar ile çalışılmaktadır. Ayrıca sondaj yardımı içinde kullanılan ROV’lar sondaj süresi ve maliyetini düşürmüştür. Aynı zamanda eğer yapılması gereken işler dalgıçların hizmet veremeyeceği derinliklerde veya şartlarda ise yine bu işlemler ROV’lar ile yapılmaktadır. Dalgıçların çalışma yaptığı derinliklerde ise hem dalgıç gözlemi hem de dalgıç yardım işlemleri de ROV’lar ile sağlanmaktadır.
Platformların kurulmasından sonra ham petrol çıkarma işlemlerine başlanılır. Bu aşamada ROV’lar ile platformlar arasında veya kara ile olan boru hatlarının incelenmesi ve bakım/onarım işleri yapılmaktadır. Ayrıca AUV’ler ile çevre etkileri gözlemlenerek güvenli bir çalışma yapılması için gereken veriler toplanarak kontrol sağlanmaktadır. Ayrıca sualtındaki valflerin ve ekipmanların kullanımları 7/24 çalışma kapasitesi olduğu için uzaktan kumandalı sistemler ile yapılarak uygun maliyetli bir çözüm de sağlanmış olmaktadır.
İşleme, Taşıma ve Depolama (Midstream): Bu aşamada artık faal hale geçmiş platformlardan ham petrol veya gazın ilk işleme işlemleri yapılır ve taşıma (veya depolama) kısmına geçilir. Bu kısımda ROV’ler boru hatlarının bakımı ve denetlenmesi ayrıca gerekiyorsa taşıma gemilerinin su altında kalan kısımlarının gözlemi için kullanılmaktadırlar.
Rafine ve Dağıtım (Downstream): Bu aşamada genellikle kıyıda bulunan tesislere aktarılan petrol veya gaz rafine edilerek, dağıtımı sağlanır. Rafinasyon ve dağıtım işlemleri için eğer deniz üstü veya altı tesisler ve ekipmanlar kullanılıyorsa bunların aktivasyonu ve gözlemi için yine ROV maliyet uygunluğu açısından tercih edilmektedirler.
Genel olarak fosil yakıtların bulunması ve çıkarılmasında giderek artan bir rol alan ROV ve AUV’ler; derin deniz kuyularında ( 400m ile 1500m derinlikte) ve ultra derin deniz kuyularında (1500m’den derin) dalgıçların kullanılamaması nedeni ile yegane çözüm olarak karşımıza çıkmaktadır. Sığ deniz kuyularında (400m’den az derinliklerde) ise hem faydalı yük taşıma kapasiteleri ve gözlemleme amacı ile dalgıç görevlerinde hem de uzun süreli gözlem ve bakım/tamir görevlerinde aktif olarak kullanılmaktadır. Gelişen teknoloji ile serbest hareket kabiliyeti giderek artan robot kolları sayesinde ROV’ler dalgıçların yapabildiği hemen hemen her görevi yerine getirebilmektedirler. Deepwater Horizon felaketinde yaşanan sorunları 1511 metre derinlikte, Schilling Robotics üretimi TITAN, ATLAS, CONAN ve ORION robot kolları kullanılarak çözüm bulunmuş ve operatörlerin uzaktan kontrol ile rahatlıkla kontrol edebildiği bu kollar ile dalgıçların ulaşamadığı derinliklerde sorunların giderilebilmesini sağlamıştır. ROV sistemleri üzerine rahatlıkla takılabilen bu kollar ve geniş sensör seçenekleri derin ve ultra-derin sularda imkânsızın başarılmasını sağlamıştır.
ROV’lar ile yapılan görevleri şu şekilde sınıflandırabiliriz:
- Hata Denetimi
- Manyetik Partikül Denetimi (MPI)
- Akıntı Değişimleri Sonucunda Esneme Denetimi
- Anafor Akıntıları Ölçümleri
- Akıntı Alanı Değişimlerini Ölçümleme (ACFM)
- Su Baskınına Uğramış Elemanların Bulunması
- Akıntı Değişimi Potansiyel Düşüşleri
- Radyografi
- Ultrasonik Denetlemeler
- Genel Görsel Denetimler
- Yakın Görsel ve Fotografik Denetlemeler
- Korozyon Denetimi
- Katodik Koruma Potansiyeli Ölçümleri
- Duvar Kalınlığı Ölçümleri
- Diğer Denetim Görevleri
- Denetim ile alakalı temizlikler
- Denetim ile alakalı taşlama işlemleri
- Denetim ile alakalı kurulumlar
- Kaynak
- Fotoğraflama
- Video Kaydı Alınması
- Katodik Koruma Okumaları
- İnşaat İle İlgili Görevler
- Boru Hattı Yatağı Açılması (Trenching)
- Kaldırma İşlemleri
- Çekme İşlemleri
- Cıvata/Mekanizma İdaresi
- Kum Torbası Destek Yerleşimi ve Yardımı İşlemleri
- Bağlantı Yapma ve Ayırma İşlemleri
- Ekipman/Faydalı Yük Taşıma
- İnşaat Temizliği
- İnşaat Ölçümleri
Bunun dışında ROV ve AUV operasyonları aşağıdaki ana hatlar ile sınıflandırılmıştır:
Ticari Görevler: Bu kategori altında ticari operasyonlar (çoğunlukla petrol ve gaz sektörü olmak üzere) yer almaktadır. AUV ve ROV sistemleri sualtı gözlem, inceleme, tamir, bakım, kaynak, kesme işlemleri, obje kurtarma ve örnek alma işlemlerinde kullanılmaktadır.
Oşinografik Araştırma Görevleri: Bu kategori altında bilimsel araştırma enstitülerinin gerekli verilere (sualtı yaşamı indeks bilgileri, çevresel şartlar, kirlilik, yeni yaşam formları ve mineral bilgileri) ulaşması için AUV ve ROV sistemleri kullanılmaktadır.
Askeri Görevler: ROV ve AUV’ler aktif olarak savunma güçleri tarafından keşif/gözetleme ve kurtarma görevlerinde uygun maliyetleri nedeni ile kullanılmaktadır. Ayrıca anti-denizaltı araçları görevleri ve mayın karşı önleme görevleri için de kullanılmaktadırlar.
Mühendislik Araştırmaları: Sürekli gelişen teknolojilerin ışığında süren AR-GE çalışmaları için kullanılan AUV ve ROV’lar ile hem deniz üstü hem de deniz altı yeni teknolojilerin geliştirilmesi için kullanılmaktadırlar.
2010 yılı itibari ile global pazarda ROV satışları 850 Milyon Dolar, AUV satışları ise 200 Milyon Dolar seviyesinde olmuştur. ROV satışlarında bu miktarın yüzde 50’si petrol ve gaz endüstrisi kapsamında, yüzde 25’i savunma sanayinde, geriye kalan yüzde 25’i de araştırma alanında gözlemlenmiştir. AUV pazarı ise daha küçük bir Pazar olduğu için yapılan satışların yüzde 50’sinden fazlası savunma sanayi tarafında, Deepwater Horizon sonrasında ise getirilen regülasyonlar ve araştırma istekleri dolayısıyla geriye kalan satışlar petrol ve gaz endüstrisi ve araştırmacılar yönünde olmuştur. Satılan AUV’lerin yüzde 70’lik kısmını 200m’den az derinliklerde görev yapan AUV’ler oluşturmaktadır. İlk satışların yapıldığı 1985 yılından itibaren giderek büyüyen AUV pazarının 2019 yılı sonu itibari ile 2.3 Milyon Dolar seviyesinde olması beklenmektedir. Şu anda kullanılan AUV’lerin yüzde 75’i, 2001-2005 yılları arasında üretilmiş ve yakın zamanda gelişen teknoloji ile yenileme çalışmaları başladığından dolayı bu rakam gerçekçi bir sonuç olarak görülmektedir. AUV’ler daha yeni bir teknoloji olduğu için ve maliyetlerinin yüzde 66-75’i ni ana sistem oluşturmaktadır (ROV’larda ise bu maliyet yüzde 40 civarındadır), geriye kalan maliyetler sensör ve aygıtlar tarafından oluşturulmaktadır. AUV’ler otonom yapıları yüzünden genel görevler için kullanılırken; ROV’lar maliyet oranlarının düşüklüğü ve görev kapasitelerinin yüksek olması nedeni ile insan kontrolünün önemli olduğu görevlerde kullanılmaktadır.